


Attention
This website is best viewed in portrait mode.
Publication Name: Telematics Wire Magazine
Date: February 2022
Towards a Domain-Centralized Automotive E/E Architecture
The automotive industry is gradually moving away from a traditional E/E architecture consisting of several ECUs over a multi-bus gateway to a centralized high-performance computer with a zone-based architecture to accomplish a software-defined vehicle concept. Heterogeneous technologies running on hardware with high-end computing power, software features partitioned across different execution environments, overthe-air update, communication to backendsystems, service-oriented architecture, high-speed Ethernet interfaces with AVB/ TSN support, etc. are key technologies for transitioning to the future. This necessitates the development of sophisticated, flexible, and scalable platform solutions for ECUs in vehicles. A domain controller platform can be designed considering requirements for moving towards a cross-domain controller platform, thus fulfilling the ECU consolidation concept.
Challenges that lie ahead & Current Trends
Legacy E/E architectures are getting more and more complex when it comes to bringing in new vehicle functions. ECUs will reach their tipping point in due course for resources, and it calls for hardware and software level changes to meet the performance KPIs and future application needs. Numerous hardware-level changes necessitate platform migration, including increased performance of the uC/SoC and other components in terms of memory, power consumption, the number of parallel processing cores available, compliance with functional safety standards, the availability of hardware accelerators such as powerful GPUs, and high-speed communication interfaces such as CAN FD, Ethernet or PCIe.
In addition, the semiconductor vendor has no explicit roadmap agreement, resulting in hardware dependencies. Compliance with cybersecurity standards, such as availability of HSM peripheral and interfaces such as I2C, SPI, and UART, must also be considered when migrating to a new platform. At the very least, some of these factors must be considered when selecting hardware for the new E/E architecture.
To address scalability with newer functions, more H/W resources such as additional CPU cores, powerful processing engines, hardware accelerators, etc., are required. This adds to the overall H/W complexity since additional controllers' external ASICs need to be interfaced.
Such complexities can be resolved by moving towards a single multi/many-core SoC-based architecture from multi-chip solutions.
There are challenges when introducing new features and their deployment in the vehicle throughout the vehicle lifecycle when it comes to function-based ECU architecture. This has led to a transition towards Service Oriented Architecture. Services can exist in multiple ECUs, other vehicles, and external infrastructure devices. The migration strategy needs to be defined when moving away from functionbased ECUs, such as identifying services and defining service catalog.
The more complex the overall hardware architecture, longer the system’s processing time and thus the more latency the system exhibits. This interferes with the real-time requirements. ECU consolidation eliminates, to some extent, timing performance issues. The unrestricted access of network interfaces to the outside world exposes them to various security threats. On one hand, Ethernet as a backbone increases speed and introduces quality of service (QoS), determinism, time-sensitive networking (TSN), and fault-tolerant communication, thereby mitigating safety and security vulnerabilities. On the other hand, software development cost increases in the functionbased ECU approach, and S/W redundancy cannot be eliminated when functions are distributed. Therefore, adopting a structured S/W architecture approach in a Centralized system also reduces software development costs. Possible Future Traditionally, in-vehicle architectures consist of a single ECU, performing a single function. Unfortunately, this has resulted in current architectures Figure 1: Multi-chip to Single-chip Solution
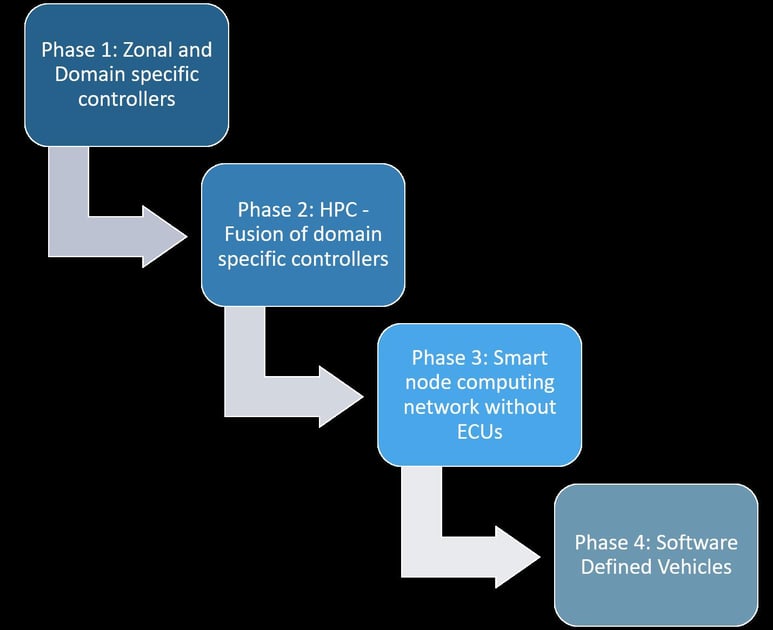
Figure 2: Phased Approach
becoming cumbersome, complicated, non-standardized, costly to implement, and difficult to package. In addition, digitalization and ACES (autonomous, connectivity, electrification, and shared mobility) are gaining traction, necessitating significantly increased computational power and intelligence. As a result, highperformance computers will be a critical component of the futuristic server-based E/E architecture.
Due to the challenges mentioned above, OEMs seek solutions that shift the in-vehicle design philosophy away from a single-function ECU and towards the consolidation of domain-specific controllers or supercomputers. This gradual consolidation of ECUs will be guided by zonal and DC-based architectures that simplify design sufficiently to serve as a precursor to a truly centralized architecture, thus a software-centric vehicle architecture.
This centralized architecture provides several benefits, including hardware/ software separation, abstraction from hardware via a middleware layer, highspeed data interfacing, and virtualization support. Additionally, this architecture enables software upgrades or flashing of new software at any time, cost savings and wiring harness reduction, increased safety and connectivity. Thus, a centralized architecture will serve as the foundation for a software-defined vehicle architecture.
Some challenges come along with the new trend such as a change in System Engineering process, development and integration process, interoperability between various suppliers, a new standard for Diagnostics of HPCs (High-Performance Computers), Service access restriction mechanism in ServiceOriented architecture, Continuous Integration framework, expensive component replacement in case of hardware damage, thermal management, etc. Model-based System Engineering approach, including behavioral, structural & real-time modeling, is highly recommended for the next generation vehicle architecture.
Road Ahead
The automotive industry is heading towards the new, emerging paradigm of next-gen vehicle architecture. Accelerated development of a production-ready solution, portability to different hardware platforms, ease of adding more applications, easy upgrade of any application, and migration to a domain-controller architecture will be critical aspects of the transition to a software-defined invehicle architecture. Moreover, features like ECU consolidation, safety-critical ECUs with increased computational power, smart sensors, cloud connectivity, and remote diagnostics will enable the true evolution towards the vehicle of the future, where each vehicle will be smart, secure, stable, and software-driven.
Therefore, the industry must wake up to the potential of integrated platforms and smoothen the path ahead. Realizing the need for a scalable integrated platform, we recently collaborated with Green HILLS Software to demonstrate an integrated platform solution called V.O.E.O.S.Y.S – Vehicle Operator Environment Observation System, in which Tata Elxsi’s Functional Safety Compliant AUTOSAR Adaptive and Driver Monitoring System are integrated on GHS INTEGRITY RTOS to realize futuristic concepts of domain controllers/HPC/ software-defined vehicles. With experienced technology partners in tow, OEMs can truly and confidently propel themselves towards a future where technology aids customercentric innovations. Figure 3: Centralized Architecture
AUTHORS
JYOTSANA SINGH Senior Technical Architect in AD/ADAS Tata Elxsi Jyotsana is a Senior Technical Architect in AD/ADASs domain, responsible for leading key projects and acting as SME for multiple projects. She is responsible for mentoring and upscaling engineers to such futuristic projects by conducting training programs. Additionally, she is also responsible for determining the future direction of the automotive industry and developing technology plans to customize or introduce new solution accelerators in autonomous mobility.
SREEJA KS Senior Technical Architect in AUTOSAR Tata Elxsi Sreeja is a Senior Technical Architect in the AUTOSAR domain, responsible for building business. Consultant for multiple AUTOSAR based programs. She is also responsible for capacity & capability building, front-ending partnership with technology leaders, defining the roadmap for the different technology areas in AUTOSAR, and conducting training programs.


